HOW TO INFERENCE SUSPECT ASSOCIATIONS
Clues
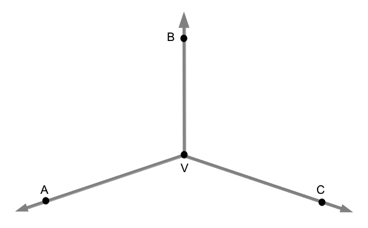
The containers' CLUE used to infer an association with the suspect will be based on geometric definitions such as these:
A LINEAR PAIR of angles is a special case
of a pair of coplanar angles.
Angle AVB + Angle BVC = 180
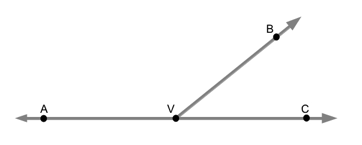
Two coplanar angles are ADAJACENT ANGLES if they have one side in common and the intersection of their
interiors is empty.
Angle AVB and Angle BVC are ADJACENT ANGLES
Oak Hill Robotics Makerspace Video Archives
NEOACM CSI/CLUE ROBOTICS CHALLENGE

THE TEAMS OF ROBOTS:
CHEMBOT performs analysis on liquid in container once identified by Scout Bot. If liquid is hazardous it must relocate container to a safe location in the warehouse.
SCOUT BOT navigates the warehouse to investigate each known location of the container. It locates containers out of place or unknown containers and communicates the location of unknown or out of place containers to ChemBot.
GAMEBOT navigates the gameboard and examines all the suspect's label while suspect is in the "suspect area". It determines the suspect
connected to the hazardous liquid based on the clues on the labels. Gamebot makes an accusation once in an accusation area. It Communicates to ChemBot/Relocator to remove the suspect and place it in the penalty box.
RELOCATOR is used to relocate the suspect
from the "Suspect Area" to the "Penalty Box".

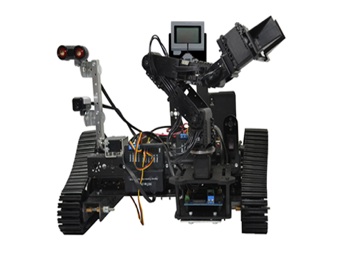
CHEMBOT
OAK HILL ROBOTICS MAKERSPACE
“The Makerspace with a Purpose!”
Cameron Hughes discusses programming the Phantom Pincher X robot arm that will be used in the CSI/Clue Robot Challenge.
Jeff Rimko demonstrates the V-REP robot simulator. It is a 3D robot simulation tool that runs under Linux and MAC environments.
Brian Jones test the pH sensor. This sensor will be used with two of the robot projects.
The Magnetic Field Sensor can be used to study the field around permanent magnets, coils, and electrical devices. This sensor will be used for a robot project.






ABOUT ORM THE MAKERSPACE MEETINGS PEOPLE PROJECTS HARDWARE PHOTOS
NEOACM (NORTHEAST OHIO ACM)
CSI/CLUE ROBOTICS CHALLENGE
The NEOACM (Northeast Ohio Association for Computing Machinery) CSI-CLUE Robotics Challenge is a biennial event designed to identify practical, safe, open-source, low-cost approaches to programming autonomous robots. The challenge pits new trends in bio-inspired artificial intelligence against classical approaches in artificial intelligence to build robot controllers. The challenge will also serve to showcase the innovative engineering ability that is untapped in Northeast Ohio. ORM will be used as an outlet for this Challenge in collaboration with NEOACM. ORM will be used as a site to design, assemble, and test robots that will be in the Challenge. ORM will be utilized as the "community outreach" for the Challenge.
ORM

The Oak Hill Collaborative, Inc. is a 501-C3 non-profit organization on the South Side of Youngstown. Our primary objective is community revitalization through small business development and neighborhood beautification with the goal of improving the quality of life along the Oak Hill corridor and the creation and utilization of a makerspace.
507 Oak Hill Ave
Youngstown, OH 44502
-
•Makerspace (3D Printing)
-
•Robotics Makerspace (ORM)
-
•Computer Workshops
-
•Small Business Incubator
-
•Neighborhood Revitalization